
Teppo Sarpila, Marek Vink, Viive Sarapuu
1. aug 2002
Artikkel on avaldatud ajakirjas Hammas
-------
Loe ka 1.osa
Klambrite planeerimine nähtavale pinnale
Kuna esteetika on tähtis, valitakse nähtavale kohale (viiendast hambast mesiaalsemale) funktsiooni seisukohalt kaks tähtsamat klambrihammast. Nende kahe hamba kuju ja asend määravadki tulevase proteesi SMS-i.
Individuaalse SMS-i määramine etapi kaupa:
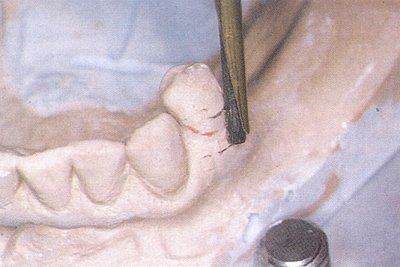
 1. Vaatleme mudelit kahe valitud klambrihamba seisukohalt ja mõtleme milliseid võimalikult vähe näha olevaid klambreid saaks sinna konstrueerida. Märgime klambriharu peade asukohad punase pliiatsiga, kas siis punktina või 1-2 mm joonena. Need peaksid asetsema üle aksiaalse prominentsi võimalikult tservikaalselt (foto 6)
1. Vaatleme mudelit kahe valitud klambrihamba seisukohalt ja mõtleme milliseid võimalikult vähe näha olevaid klambreid saaks sinna konstrueerida. Märgime klambriharu peade asukohad punase pliiatsiga, kas siis punktina või 1-2 mm joonena. Need peaksid asetsema üle aksiaalse prominentsi võimalikult tservikaalselt (foto 6)
2. Järgnevalt vaatleme mudelit oklusaalselt umbes poole meetri kauguselt. Proovime ühe silmaga vaadates saada mudeli sellise nurga alla, et eelnevalt punasega joonistatud klambripeade asukohad kaoksid võimalikult üheaegselt “silmapiiri” taha. Nii olemegi määranud peaaegu õige SMS-i.
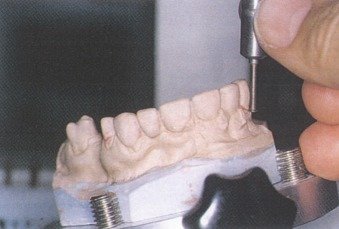
3. Asetame mudeli äsja leitud aendis paralleelomeetri tööpinnale. Nüüd saame täpsustada valitud SMS-i testriga.
4. Võtame allaminekumõõturi (0,25 või 0,5) ja asetame mõlemad punased jooned mõõturi osutatud allaminekuasendisse. Just selle protseduuri juures vajame mitmemõõtmelist mõtlemisvõimet. Kui muudame mudeli asendit mingis suunas, saamaks ühte punast joont allamineku piirkonda. Samas tuleb mõelda, kuidas see mõjutab teise klambrihamba punase joone asukohta. Nii saamegi planeerida kahe klambri retentsiooniharu ulatust ja asukohta individuaalselt sinna, kuhu tahame (foto 7). Kui mõlema klambri retentsiooniharud on õiges kohas ja ulatuses, lukustame tööpinna selles asendis. See ongi individuaalne SMS.
Joonis 7
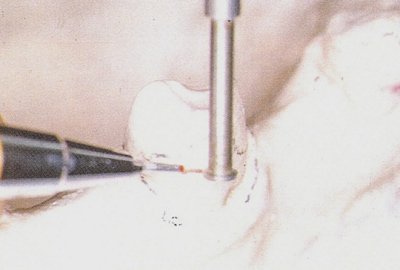
5. Tõmbame prominentsijoonistajaga kõikidele klambrihammastele prominentsijooned. Samas võime joonistada ka kogu proteesi prominentsijooned (foto 8).
Joonis 8
6. Mõõdame teiste klambrihammaste allaminekud ja märgime punase punkti või joonega (1-2 mm) võimalikud retineerivate harude peade asukohad. Retentsiooniks vajaliku allamineku ulatus sõltub vajadusest. Võimalikke tulevase klambriharu asukohti võib olla mitu (foto 9).
Joonis 9
7. Sinise pliiatsiga joonistades planeerime klambrite kulgemise. Valime soovitud klambritüübid vastavalt individuaalsetele vajadustele. Klambrid võivad olla ka kõik erinevat tüüpi, kui need vaid sisaldavad vajalikke osi ning täidavad esitatud nõudmisi. Fotol 10 on klambrid joonistatud punase pliiatsiga. Tuleks siiski kasutada sinist värvi, sest see on paremini eristatav.

Joonis 10
8. Vahatame klambrihammaste negatiivsed allaminekud kipsmudelist erinevat värvi läbipaistva vahaga. Joonistatud klambrijooned peavad jääma nähtavaks. Modelleerime vaha ettevaatlikult prominentsijoonega samasse tasapinda (foto 11).

Joonis 11
9. Töö jätkub tavalisel moel. Modelleerime klambrivaha valumudelile, töömudelil valminud plaanide kohaselt. Nii olemegi kindlustanud võimalikult vähe näha olevad, kuid siiski toimivad klambrid ja õige sisseminekusuuna (foto 12).

Joonis 12